
Welche Komponenten benötigt man eigentlich, um ein Elektroauto zu bauen? Karl zeigt uns, wie es geht – in 24 Schritten. Im Teil 2 widmen wir uns dem Ladesystem und dem Antrieb.

On-Board-Lader sind echte AC-DC Fans! Um die Batterie wieder zu laden, wird ein Ladegerät benötigt, das aus dem Wechsel- bzw. Drehstrom des Netzes den Gleichstrom erzeugt, den die Batterie benötigt. Diese Aufgabe übernimmt der On-Board-Lader (OBL, oder auch On-Board-Charger = OBC). Je höher die Leistung des OBLs, desto teurer wird er! Inzwischen setzen sich auf dem deutschen Markt vermehrt 11-kW-On-Board-Lader durch.
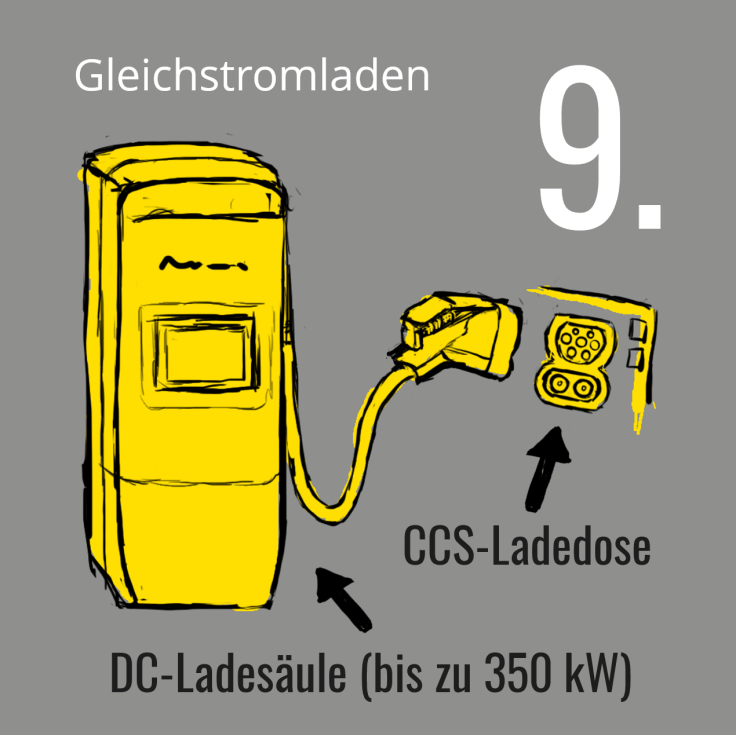
Beim Gleichstromladen (DC-Laden oder auch Schnellladen) wird das Ladegerät quasi nach außen verfrachtet und gehört nicht mehr zum Auto. Dafür können hier viel höhere Leistungen erzielt werden (bis zu 350 kW). Damit Karl’s E-Auto Schnellladen kann, braucht er aber eine CCS-Ladedose, über die man sowohl AC als auch DC laden kann.

Die Auswahl der „richtigen“ Position für die Ladedose hat schon fast philosophische Züge! Hier gibt es alle denkbaren und nicht denkbaren Positionen, häufig bedingt durch den Bauraum im Fahrzeug. In Ländern mit Rechtsverkehr sind Ladedosen auf der rechten Seite nicht schlecht, vor allem, wenn man häufig am Straßenrand parken (und laden) muss. Beliebt und praktisch sind auch die „Nasenlader“. Hier kann man einfach vorwärts an die Ladesäule heranfahren. Weil Karl gerne vorwärts einparkt, wählt er diese Ladedosenposition für sein E-Auto.

Die Antriebseinheit eines Elektroautos besteht aus drei wesentlichen Komponenten. Der Inverter wandelt den Gleichstrom (DC) der Batterie in Drehstrom (AC) für den Elektromotor um. Die meisten Elektroautos verfügen über ein nicht schaltbares Ein-Gang-Getriebe mit Untersetzung. Die Drehzahl des Elektromotors wird also auf die Raddrehzahl reduziert.
Da der Elektromotor auch als Generator arbeiten kann und dann Strom erzeugt (z.B. beim Bremsen), spricht man korrekterweise von einer Elektromaschine (oder kurz: E-Maschine). Kupplungen, Differentialsperren, zig Gänge usw. benötigt ein E-Auto nicht.
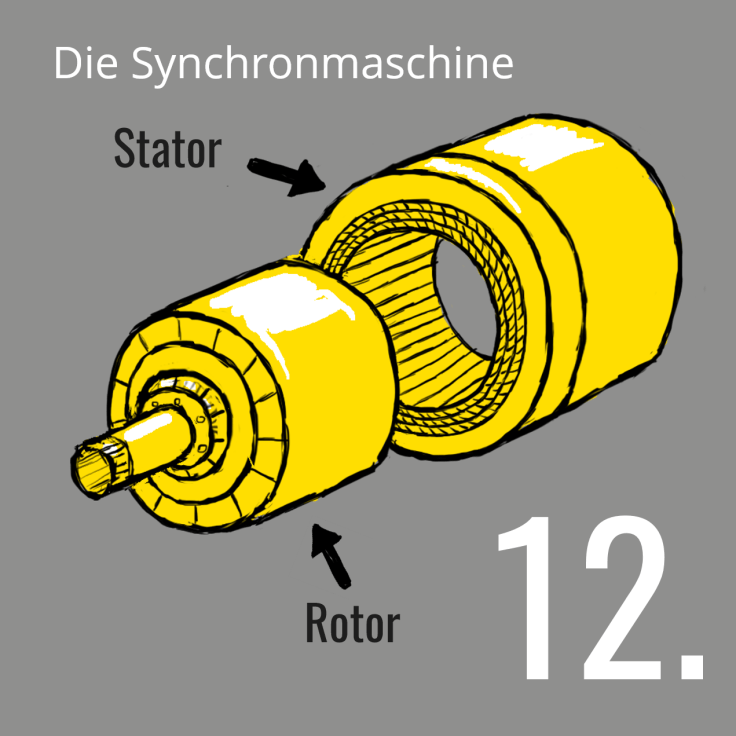
Viele Hersteller setzen bei ihren Elektroautos auf Synchronmaschinen. Diese heißen so, weil der Rotor sich exakt mit der Frequenz dreht, die das Drehstromfeld des Stators vorgibt. Synchronmaschinen haben eine enorm hohe Leistungsdichte, einen sehr hohen Wirkungsgrad und können äußerst kompakt gebaut werden, weshalb sie auch häufig bei Hybrid-Fahrzeugen eingesetzt werden.
Synchronmaschinen werden meistens permanenterregt (=PSM, permanenterregte Synchronmaschine). Um das Magnetfeld aufzubauen, das notwendig ist, damit der Rotor sich dreht, werden sehr leistungsstarke Magnete benötigt, die teuer sind und seltene Erden enthalten.
Bei fremderregten Synchronmaschinen (FSM) können die Magnete entfallen, dafür werden hier Schleifringe (früher: Kohlebürsten) verbaut, um einen Strom auf den Rotor zu übertragen. Damit ist die FSM nicht mehr 100%ig wartungsfrei.

Bei der Asynchronmaschine (ASM) dreht sich der Rotor immer etwas langsamer, als es das Magnetfeld vorgibt. Magnetfeld und Rotor laufen also nicht synchron, sondern asynchron. Es entsteht ein Schlupf zwischen Rotor und Stator.
Die ASM zeichnet sich durch einen relativ einfachen Aufbau aus, ist günstig, da keine teuren Magnete benötigt werden, und sehr robust. Dafür baut sie etwas größer. Wegen des Schlupfes ist der Wirkungsgrad der ASM etwas schlechter als bei der PSM.
Aufgrund der hohen Zuverlässigkeit und der günstigen Preise werden standardisierte ASM zu tausenden in der Industrie eingesetzt. Diese sehen dann so ähnlich aus wie auf dem Bild. Die ASMs für Elektroautos sind natürlich deutlich komplexer aufgebaut.
Die bekanntesten Elektroautos mit ASM sind die früheren Tesla Model S und X, der Audi e-tron oder der Mercedes EQC.
Tesla kombiniert inzwischen die Vorteile der ASM und der PSM und verbaut bei den Modellen mit Dual Motor jeweils einen Motor jeder Bauart.
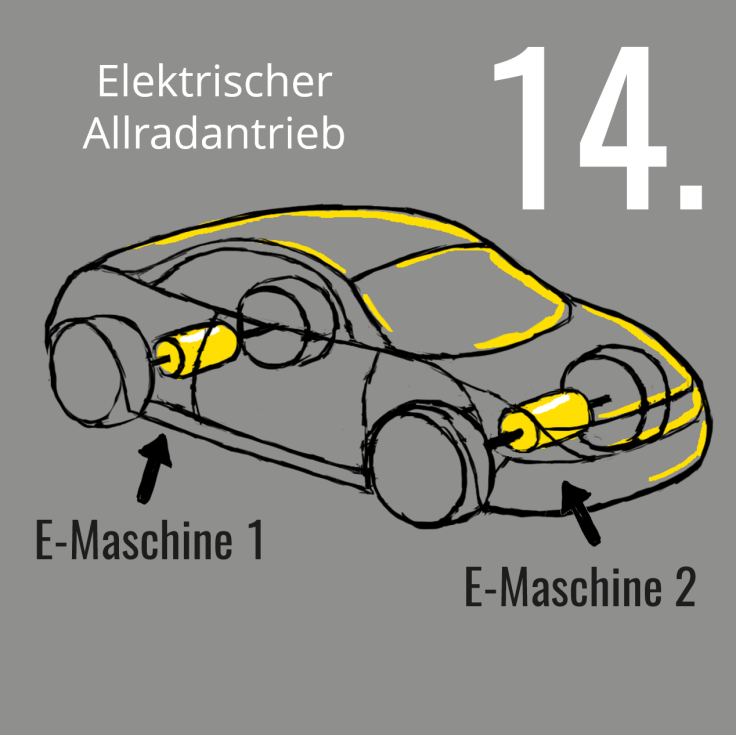
Um ein Elektroauto mit Allradantrieb auszustatten, wird einfach eine zweite E-Maschine an der anderen Achse verbaut. Da die Motoren unabhängig voneinander geregelt werden können (es gibt ja keine mechanische Kopplung), reagiert ein elektrisches Allradsystem viel schneller und genauer, als es ein mechanisches System jemals könnte.
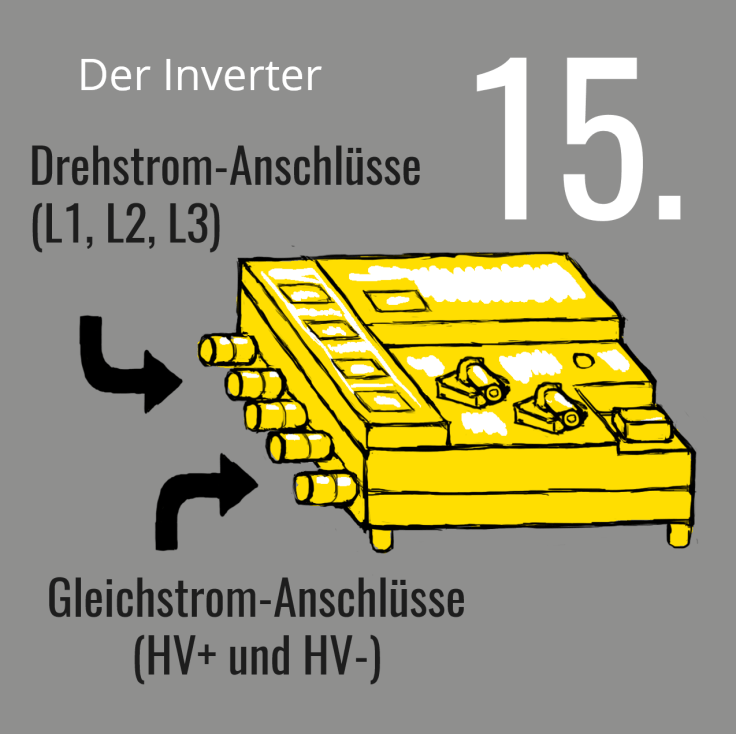
Der Inverter ist ähnlich wie der On-Board-Lader ein AC/DC-Wandler. Er wandelt den Gleichstrom (DC) der Hochvolt-Batterie in Drehstrom (AC) zum Antrieb der E-Maschine um. Das geht natürlich in beide Richtungen, denn beim Bremsen (Rekuperieren) erzeugt die E-Maschine einen Drehstrom, der durch den Inverter in einen Gleichstrom gleichgerichtet wird. Damit kann dann wieder die Batterie aufgeladen werden.
Da die Leistung des Inverters so hoch sein muss wie die Leistung der E-Maschine, wird der Inverter ziemlich warm, auch wenn der Wirkungsgrad bei über 98% liegen kann. Deshalb muss ein Inverter zusätzlich gekühlt werden.
Mit der Batterie und dem Lade- und Antriebssystem sind die wichtigsten Komponenten bereits im Auto. Doch einige Peripheriebauteile fehlen noch, die in Teil 3 von „Wir bauen uns ein Elektroauto!“ vorgestellt werden.
Weiter geht’s im dritten Teil von „Wir bauen uns ein Elektroauto!“.
Danksagung:
Alle Illustrationen hat athousandjets_art exklusiv für Generation Strom erstellt. Vielen Dank! 🙂
Weiterführende Links:
Die komplette Serie gibt es auch auf Instagram unter dem Hashtag #WirBauenUnsEinElektroauto.
